Принципы построения информационной шины данных Интегрированных Мостиковых Систем
| Авторы: | К. В. Смелков П. Г. Фёдоров
ЗАО "Морские Навигационные Системы" |
|---|
( Статья была опубликована в мартовском номере журнала Морской Вестник №1(21) в 2007 году. )
В настоящее время на ходовых мостиках судов и ходовых командных постах (ХКП) кораблей все большее применение находят интегрированные мостиковые системы.
Использование интегрированных мостиковых систем (ИМС) повышает эффективность управления судном (кораблем), снижает массо-габаритные характеристики оборудования, обеспечивает улучшение эргономики рабочих мест и общего дизайна помещения ходового мостика (ХКП).
Использование в составе ИМС унифицированных аппаратных средств повышает надежность системы, а также снижает затраты на ее изготовление и обслуживание.
Внешний вид ИМС показан на рис.1.
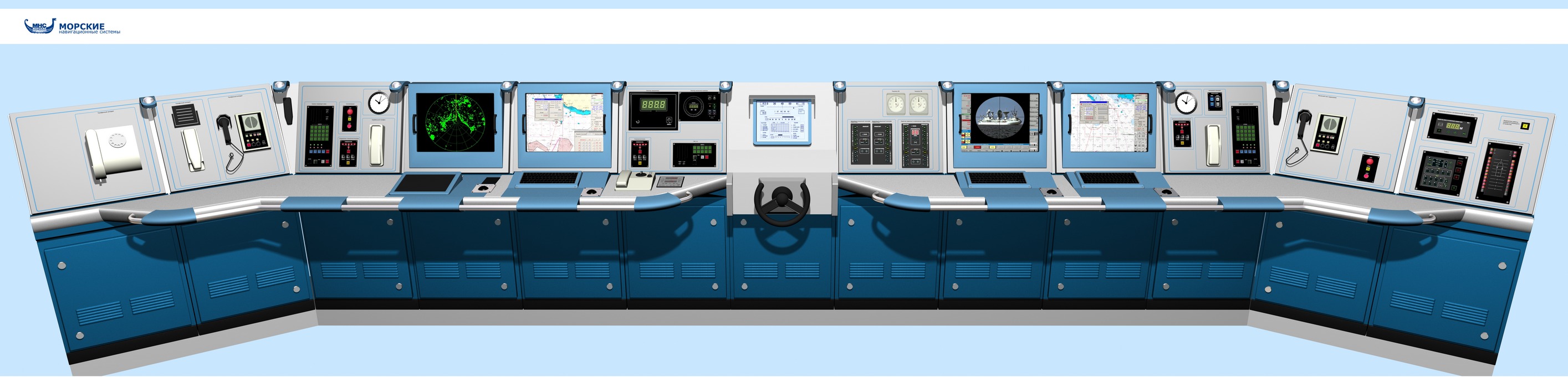
Рис.1. Интегрированная мостиковая система
ИМС, разрабатываемые и изготавливаемые для кораблей, существенно отличаются от ИМС, поставляемых на гражданские суда.
Это связано с необходимостью обеспечения гораздо большего количества функций, сопряжения с большим количеством оборудования с использованием различных протоколов связи, в том числе нестандартных.
В данной статье рассматриваются принципы построения информационной шины данных корабельных интегрированных мостиковых систем.
Интегрированная Мостиковая Система представляет собой открытую, распределённую, адаптивную вычислительную систему, построенную на базе современных вычислительных средств, объединённых в единую информационную локальную сеть.
На рис. 2 показана структурная схема ИМС.
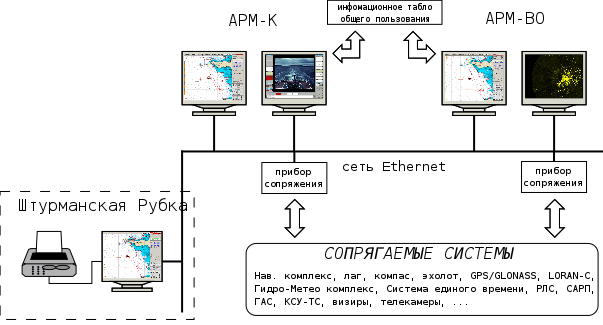
Рис.2. Типичная структурная схема ИМС
Сопряжение с установленным на корабле навигационным вооружением и другими системами осуществляется по (преимущественно) цифровым и аналоговым каналам связи. Кроме того ИМС обеспечивает приём и отображение первичной радиолокационной информации от навигационных РЛС корабля.
В типовой конфигурации в ИМС предусматриваются два автоматизированных рабочих места (АРМ): командира корабля и вахтенного офицера.
Обмен информацией внутри системы осуществляется по локальной вычислительной сети Ethernet.
1 Основные функции ИМС
ИМС обеспечивает решение следующих задач:
- Сбор и обработку информации от технических средств корабля, в т.ч. не имеющих унифицированных цифровых информационных выходов.
- Создание на основе собранной информации единого информационного поля данных.
- Распределение информации и её вывод на средства отображения для обеспечения выполнения должностными лицами своих функциональных обязанностей.
- Осуществление судовождения и обеспечение навигационной безопасности плавания.
- Управление, в т.ч. с помощью графического пользовательского интерфейса отдельными системами и устройствами судна.
Отображаемая на АРМ информация:
- Первичная и вторичная радиолокационная информация.
- Время, координаты, курс, путевой угол, скорость, глубина под килем, параметры качки.
- Электронная навигационная карта с траекторией пути судна.
- Информация от АИС.
- Телевизионное изображение от систем видеонаблюдения.
- Метеорологические данные.
- Длина вытравленной якорной цепи.
- Состояние сигнально-отличительных огней.
- Параметры главных двигателей и вспомогательных устройств.
- Параметры судовой электроэнергетической установки.
- Сигнализация: температурно-тревожная, охранная и наличия воды в помещениях.
- Информация от других систем в зависимости от проекта судна.
2 Сопрягаемые системы
ИМС обеспечивает сопряжение со следующими корабельными системами:
- Навигационный комплексили некомплексированные навигационные приборы, в том числе
- Лаг
- Гирокомпас
- Эхолот
- Приёмоиндикатор СНС "ГЛОНАСС/НАВСТАР"
- Приёмоиндикатор РНС
Гидро-Метео комплекс
Система единого времени
РЛС (видео + формуляры целей)
ГАС
Комплексная система управления техническими средствами (КСУ-ТС)
Оптико-Электронные визиры (оптический канал + управление) и телекамеры
Электронное табло навигационных параметров
Типы сопрягаемых интерфейсов:
- ГОСТ 26765.52-87 / ГОСТ Р 52070-2003 (MIL-STD-1553B)
- RS-422/485
- CAN
- Ethernet
- Видео сигнал от РЛС
- Полноцветные телевизионные сигналы (ГОСТ 7845-92)
3 Информационная шина данных ИМС
Многообразие типов интерфейсов сопряжения, сопрягаемого оборудования, протоколов связи (транспортного уровня), приводят к необходимости создания (локальной) подсистемы, задачей которой будет унификация распределённого пакетного ввода/вывода между ИМС и сопрягаемыми системами.
Многообразие протоколов сопряжения в части структур данных приводит к необходимости создания подсистемы, задачей которой будет унификация обработки и обмена прикладными данными между ИМС и сопрягаемыми системами.
Рассмотрим эти задачи по порядку.
3.1 Подсистема пакетного ввода/вывода
Задача данного уровня состоит в том, чтобы обеспечить унифицированный пакетный ввод/вывод в многомашинном комплексе.
Реализована следующая схема:
Вводится именование точек ввода/вывода по следующему правилу:
//<УЗЕЛ>/<ТИП_ИНТЕРФЕЙСА>/<УСТРОЙСТВО>:(tx|rx)
где
- УЗЕЛ
идентификатор вычислителя в комплексе
- ТИП_ИНТЕРФЕЙСА
тип интерфейса сопряжения
- УСТРОЙСТВО
конкретное устройство ввода/вывода, возможно с указанием дополнительной информации для устройств осуществляющих мультиплексирование
- tx или rx
направление ввода/вывода относительно ИМС
например:
- //node1/serial/ttyM0:rx
приёмник последовательного интерфейса ttyM0 на первом узле.
- //node3/1553b/tmk0-25.17:tx
узел 3, интерфейс MIL-STD-1553B, 17-й подадрес устройства tmk0 в направлении на передачу.
ПО уровня шины данных предоставляет сервис пакетного обмена типа публикация/подписка (publish/subscribe),
а именно:
- ПО на одном узле может подписаться по имени на поток ввода/вывода
- ПО на другом может опубликовать факт наличия нового пакета на потоке ввода/вывода
Если имя потока подписки и публикации совпадают, внутренний алгоритм маршрутизации потоков произведёт доставку пакета подписчику.
Также работают подписки по т.н. регулярным выражениям [1].
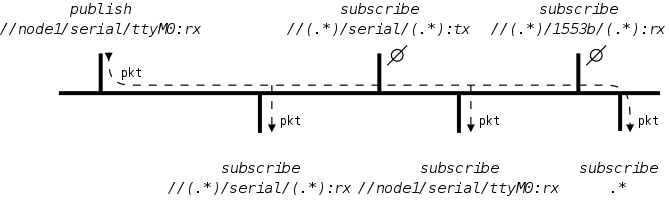
Рис.3. Иллюстрация работы publish/subcribe
В качестве транспортного уровня внутренней магистрали используется сеть Ethernet и вышестоящие протоколы семейства IP. Максимальный размер пакета - 8 килобайт.
Весь ввод/вывод осуществляемый ИМС осуществляется именно с помощью обмена пакетов по внутренней информационной магистрали и с помощью специальных программ - агентов ввода/вывода.
Если узел располагает какими-то устройствами ввода/вывода, то на нём постоянно работает специальная программа обеспечивающая стыковку внутренней шины с данным устройством.
Рассмотрим пример последовательных устройств:
Пусть узел-1 располагает 8 последовательными устройствами: ttyM0 - ttyM7, тогда
- все присвоения именам из диапазона //node1/serial/ttyM[0-7]:tx <-- pkt на любом узле, приведут к передаче пакета на соответствующее устройство узла-1
- все принятые агентом ввода/вывода пакеты с физического интерфейса, будут ретранслированы на внутреннюю магистраль ИМС под соответствующим именем, например //node1/serial/ttyM2:rx.
Таким образом предложенная схема:
- позволяет унифицировать ввод/вывод для различных интерфейсов.
- позволяет осуществлять ввод/вывод в многомашинном комплексе, вне зависимости от расположения точки ввода/вывода - локальной или удалённой.
- в штатном режиме позволяет осуществлять удалённый мониторинг и отладку всего ввода/вывода или некоторой его части (мониторинг всего -- подписка на '.*').
- в штатном режиме позволяет осуществлять протоколирование всего ввода/вывода или некоторой его части на внешний носитель.
- с помощью штатного ПО поставляемого с системой позволяет воспроизвести записанный ранее ввод/вывод в произвольном темпе.
- масштабируется по отношению к новые типам интерфейсов и увеличению количества узлов ИМС.
- также, может быть использована для организации внутренних каналов связи ИМС.
- гибкость системы обеспечивается за счёт отказа от соединений типа точка-точка и переходу к шинной архитектуре.
3.2 Уровень именованных данных
Задача данного уровня состоит в том, чтобы унифицировать работу с прикладными данными, а также унифицировать преобразование информации между пакетным и прикладным уровнями данных.
Реализована следующая схема:
Вводится соглашение о именовании величин.
А именно, для всех прикладных величин составляется единое правило их именования в рамках ИМС. Например:
Величина Имя Курс hdt Путевой угол cog Широта lat Долгота lon Пеленг brng Угол места elev Крен roll Дифферент pitch и так далее
Вводится пространство имён прикладных данных:
/<ДОМЕН>/<ВЕЛИЧИНА>
где
- ДОМЕН
наименование прибора или сопрягаемой системы
- ВЕЛИЧИНА
наименование одного из параметров вырабатываемого сопрягаемой системой
например:
- /КОМПАС/hdt
курс корабля выработанный компасом
- /НАВ.КОМПЛЕКС/hdt
курс корабля выработанный корабельным навигационным комплексом
ПО уровня именованных данных предоставляет следующие сервисы:
- чтение данных по имени
- публикация/подписка (publish/subscribe) на именованные данные.
- публикация с выходом на уровень ввода/вывода
Принцип работы сервиса публикации/подписки аналогичен изложенному в части Информационная шина данных ИМС
Сервис публикация с выходом на уровень ввода/вывода описан ниже в разделе ПЕРЕДАЧА.
Уровень ПО отвечающий за реализацию протоколов связи осуществляет связывание пакетного уровня с пространством имён прикладных данных.
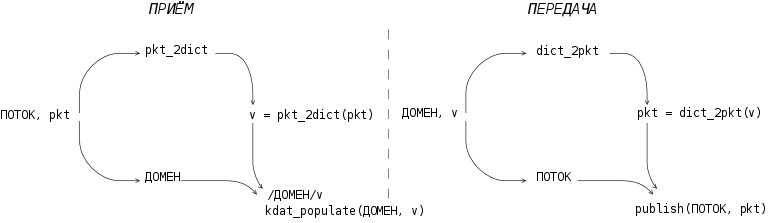
Рис.4. Связывание пакетного уровня с уровнем прикладных данных
На Рис.4 схематически изображен процесс связывание уровня прикладных данных с пакетным уровнем.
Рассмотрим этот процесс подробнее:
ПРИЕМ
от внешней системы по потоку ПОТОК поступает пакет информации pkt.
по настройкам ИМС эта информация преобразуется в
- ДОМЕН -- имя сопрягаемой системы
- pkt_2dict -- алгоритм протокола приёма
принятый пакет информации обрабатывается алгоритмом протокола приёма. В результате получается набор именованных данных v вида:
v = {'имя1': значение1, 'имя2': значение2, ...}ДОМЕН пополняется полученными именованными данными, происходит уведомление всех подписчиков домена.
пример (приём данных от GPS):
/* поступает новый информационный пакет */ ПОТОК = '//node2/serial/ttyM2:rx' pkt = '$GPRMC,211500.00,A,5800.00,N,2200.000,E,11.2,275.1,,,\n\r' /* ИМС определяет, что информация поступает от приёмника GPS */ ДОМЕН = '/GPS1' pkt_2dict = /* реализация протокола приёма IEC61162_1 в части предложения RMC */ /* v = pkt_2dict(pkt) */ v = {'daytime_utc': 21:15, 'lat': 58.0*degree, 'lon': 22.0*degree, 'sog': 11.2*knot, 'cog': 275.1*degree } /* пополнение пространства именованных данных, уведомление подписчиков */ kdat_populate(ДОМЕН, v)ПЕРЕДАЧА
- прикладное ПО инициирует выдачу набора именованных данных v в ДОМЕН
- по настройкам ИМС эта информация преобразуется в
- ПОТОК -- поток для выдачи в сопрягаемую систему
- dict_2pkt -- алгоритм протокола передачи
- набор именованных данных v обрабатывается алгоритмом протокола передачи. В результате формируется пакет pkt для выдачи в сопрягаемую систему.
- Происходит публикация пакета, что в свою очередь приводит к выдачи на соответствующем узле пакета агентом ввода/вывода в сопрягаемую систему.
пример (выдача целеуказания визиру):
/* прикладное ПО готовит исходные данные */ ДОМЕН = '/ВИЗИР' v = {'brng': +30*degree, 'elev': -0.5*degree} /* работает связка именованные данные -> пакетная передача */ ПОТОК = '//node1/serial/ttyM10:tx' dict_2pkt = /* реализация протокола связи ИМС -> ВИЗИР */ /* pkt = dict_2pkt(v) */ pkt = '$BRVPO, ... ,+030.0,-00.5, ... *9A\n\r' /* вывод пакета к сопрягаемой системе */ publish(ПОТОК, pkt)
На уровне прикладного ПО предложенная схема позволяет:
- отделить протокольный уровень от уровня прикладных данных.
- унифицировать работу с прикладными данными.
- унифицировать приём и обработку прикладных данных от сопрягаемых систем.
- унифицировать выдачу прикладных данных и команд сопрягаемым системам.
- в штатном режиме осуществлять мониторинг и отладку поступающих и исходящих данных.
4 Заключение
В статье представлен краткий обзор Интегрированной Мостиковой Системы разработки ЗАО "Морские Навигационные Системы".
Рассмотрены вопросы организации и унификации ввода/вывода в многомашинном комплексе, а также вопросы организации и унификации работы с данными на прикладном уровне.
Предложенные подходы позволяют
- Выделить в задаче сопряжения уровни: транспортный, протокольный и уровень именованных данных.
- Унифицировать ввод/вывод и работу с прикладными данными в многомашинном комплексе.
- Производить мониторинг, отладку и протоколирование как на уровне ввода/вывода, так и на уровне обмена прикладными данными.
Разработанная архитектура и ПО шины данных ИМС обеспечивают возможность сопряжения с локальными шинами данных других систем, или с общекорабельной системой обмена данными (ОКСОД).
ЗАО "Морские Навигационные Системы" в ходе разработки ИМС приобретён большой опыт в части комплексирования аппаратных средств, сопряжения с корабельными системами, разработки архитектуры и ПО информационной шины данных, разработки ПО АРМ.
Описанные принципы построения ИМС обеспечивают гибкость при построении системы, а также возможность ее масштабирования с расширением количества функций и добавлением новых АРМ.
Приобретённый при создании ИМС опыт, позволяет разрабатывать и другие распределённые корабельные системы.
Рассмотренная в статье схема построения ИМС внедрена на действующих кораблях.
5 Литература
| [1] | Фридл Дж. Регулярные выражения. Библиотека программиста. --- СПб.: Питер, 2001. 352 с. ISBN 5-318-00056-8. |
| [2] | Денисов В.И. Малый артиллерийский корабль нового поколения // Морская радиоэлектроника 2005. - Вып. 4(14) |
| [3] | Королев Е.В. Повышение эффективности использования магистралей ГОСТ 26765.52-87 (MIL-STD-1553B), RS485, CAN в корабельных системах управления. // Морской Вестник 2006. - Вып. 4(20) |